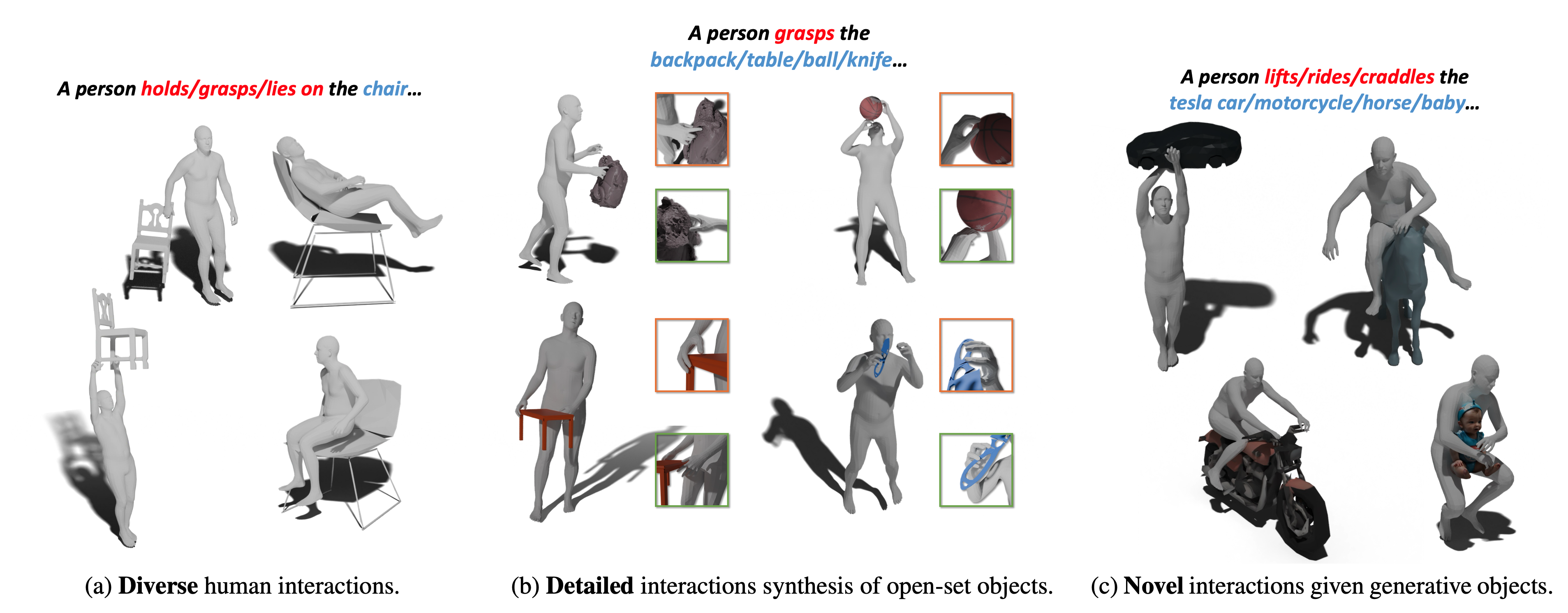
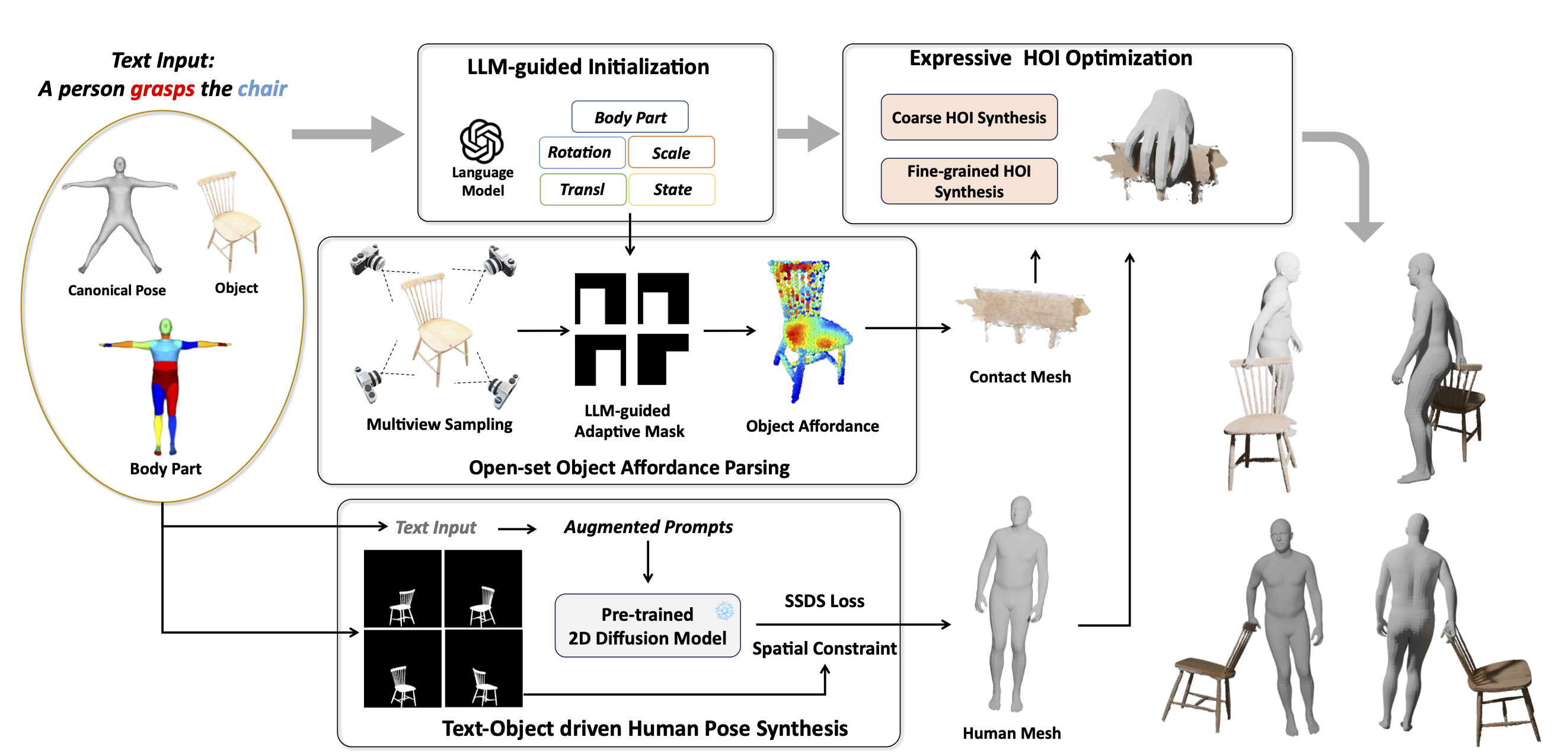
 InteractAnything: Zero-shot Human Object-Interaction Synthesis via LLM Feedback and Object Affordance Parsing
InteractAnything: Zero-shot Human Object-Interaction Synthesis via LLM Feedback and Object Affordance Parsing
CVPR 2025 Highlight